概要
今回の記事では、汎用ロボットを使って自動化した自動プレス機の動作を再現します。これは作業員の代わりに産業用ロボットを活用して、部品(ワーク)の投入や取り出しなどの搬送動作を自動化したプレス加工設備となります。汎用ロボットは多関節型で動作範囲が広く、複数の工程に対応できる柔軟性が特徴です。これにより、部品のセットから加工、取り出しまでの一連の作業を無人で行えるため、省人化・作業効率化・安全性向上が期待できます。また、段取り替えや生産品種の変更にも柔軟に対応できるため、少量多品種の生産現場にも適しています。近年はセンサーやビジョンシステムと連携することで、より高精度かつ柔軟な対応が可能になっています。
参考情報:しのはらプレスサービス株式会社様Youtube
モデル
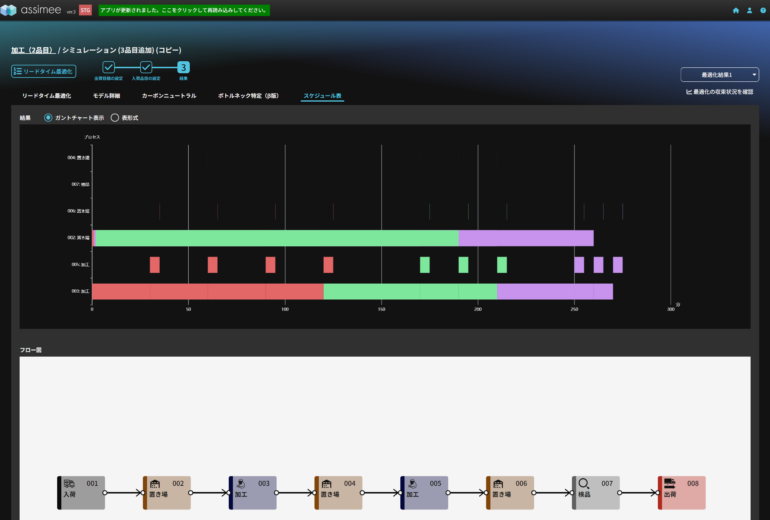
今回作成するモデルは以下のようになります。

ロボットアームとプレス加工機は以下のように動作します。
- ワークがワーク置き場に入荷
- ワークをロボットアームが掴んで、検品場所、プレス機、完成品置き場と1箇所ずつ順番にワークを搬送
- プレス機でプレス加工
- ロボットアームの搬送ではアームが空いているかの情報を要求することで、1個以上のワークを輸送しない
- プレス後の完成品出荷は5個単位で行う
以上を実現するため、情報を上流側に戻すためのループを用意します。
シミュレーション
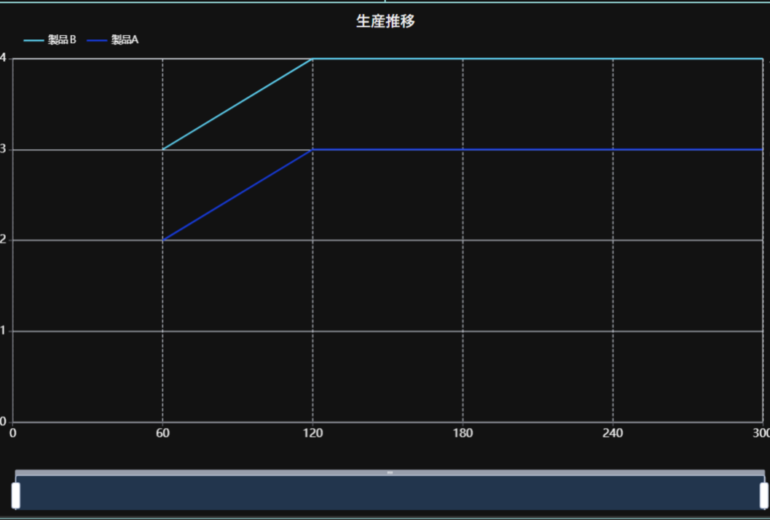
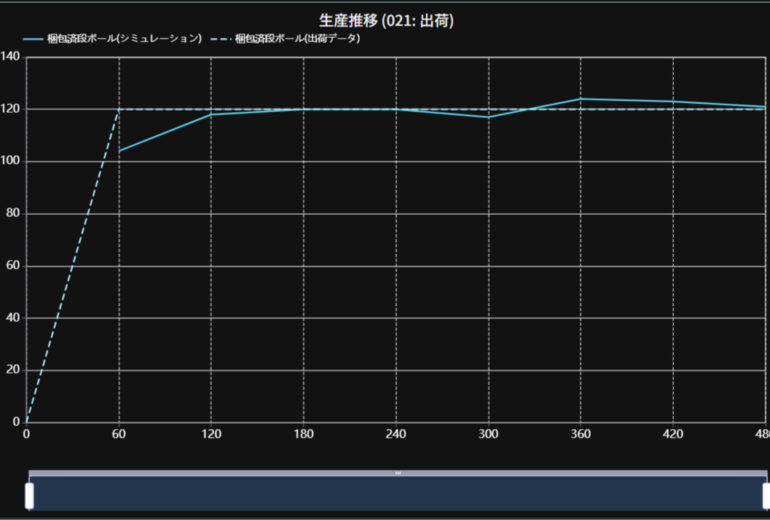
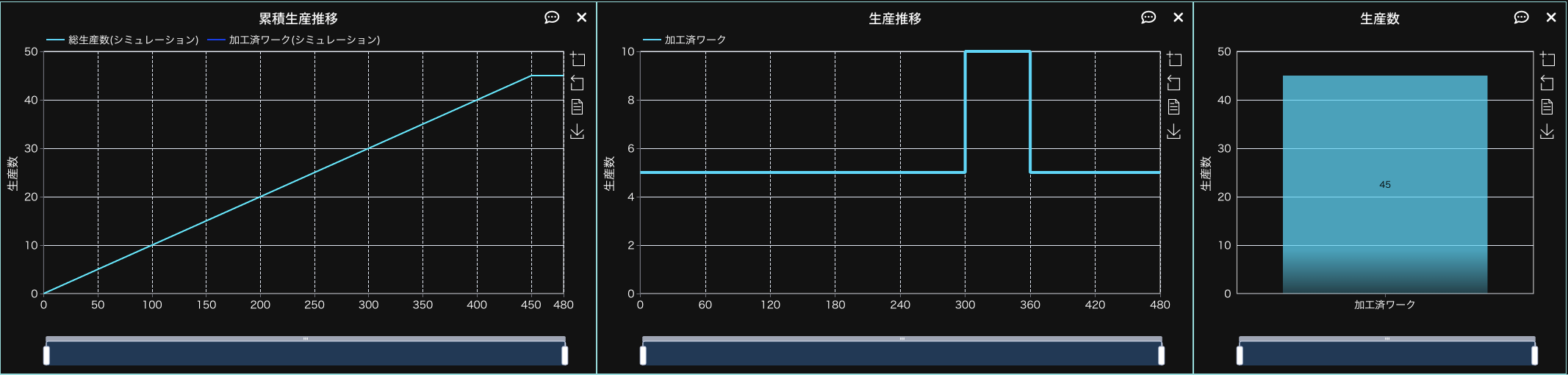
モデルを作成したらシミュレーションを480分の設定で行います。シミュレーションが終わると以下の結果が表示されます。生産推移が平らになっておらず、60分で5個の出荷と10個の出荷が混在しているのは、想定通り5個セットで出荷が行われているためです。
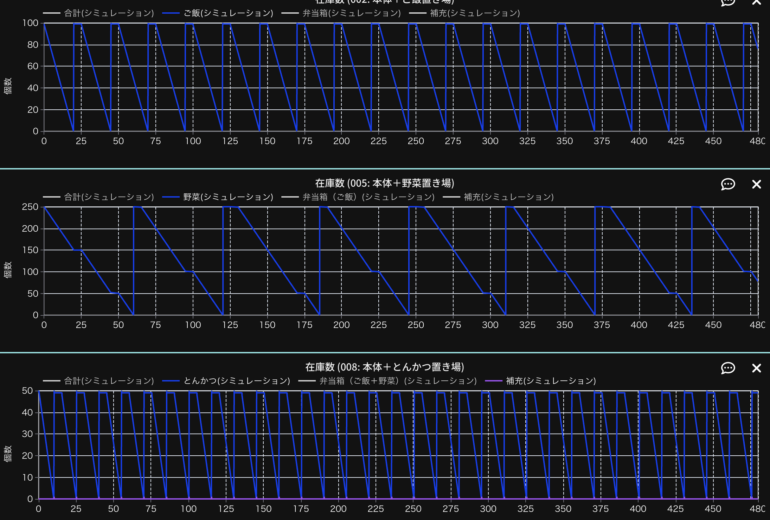
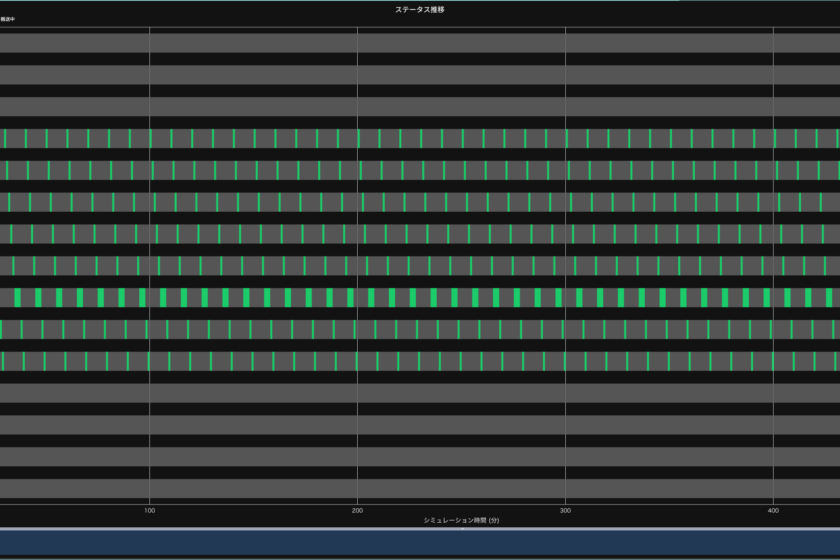
次にロボットアームが想定通り、1個のワークのみを搬送できているかを確認します。ステータス推移は以下のように表示されます。
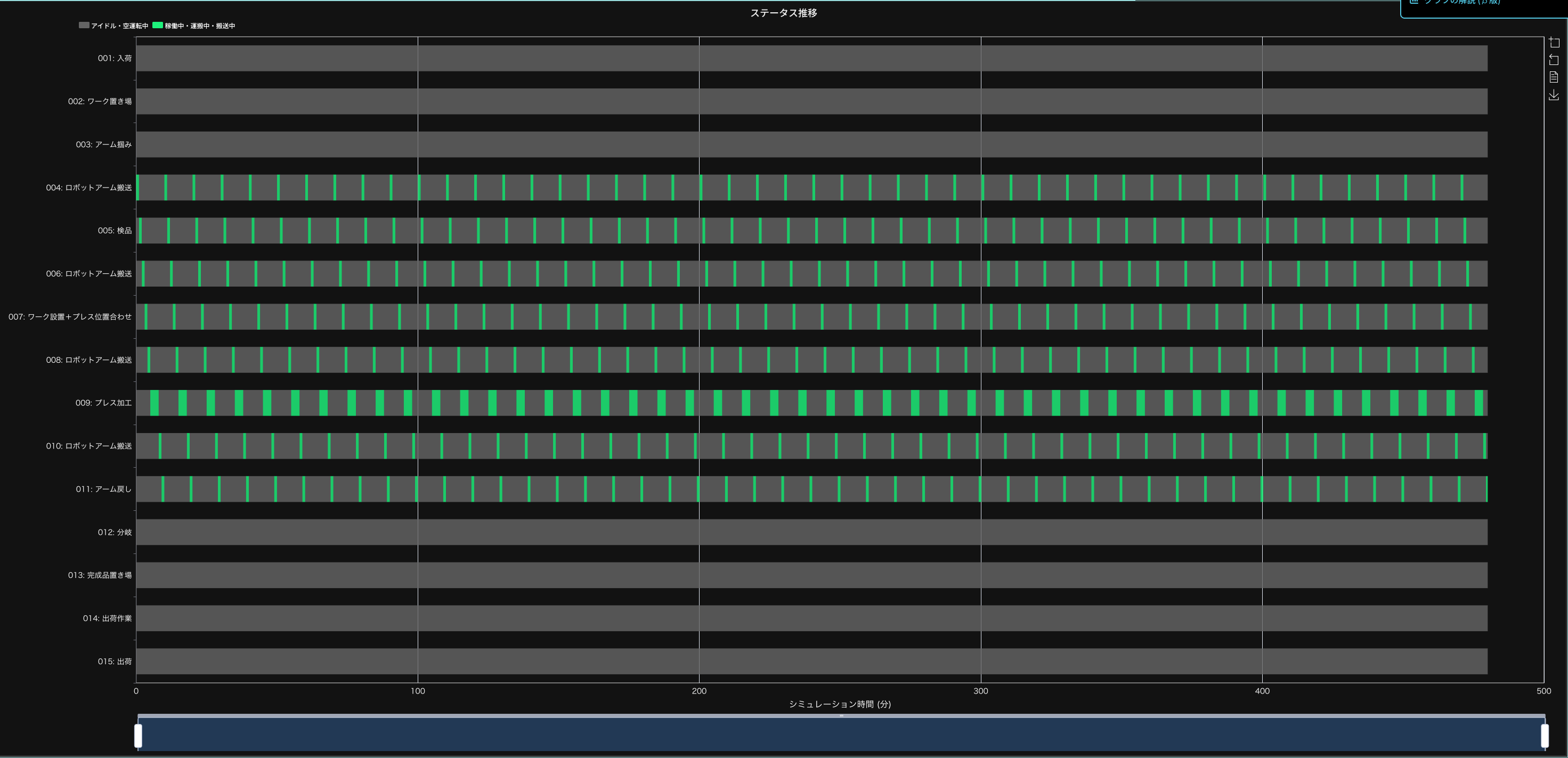
ステータス推移を見ると「003アーム掴み」で掴まれたワークが、「004ロボットアーム搬送」、「005検品」から「011アーム戻し」まで1つ1つのプロセスを1つ1つ順番に搬送され、加工が行われていることが、確認できます。
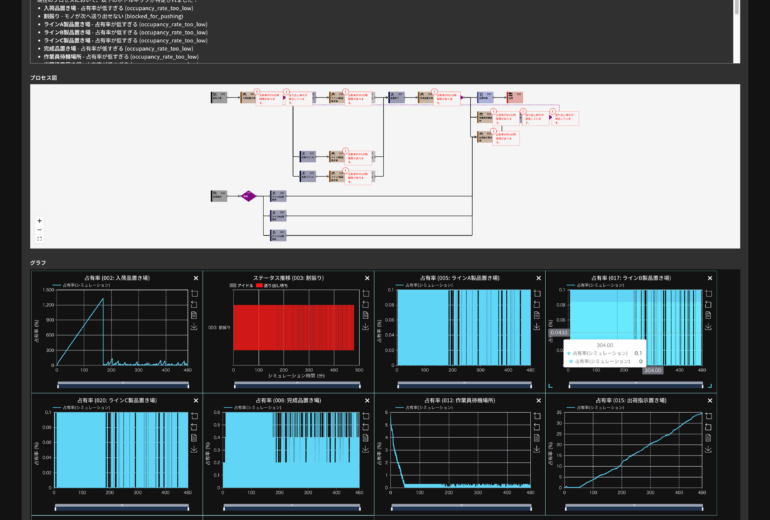
今回は比較的単純で直線的な搬送を再現しましたが、assimeeでは途中に仕掛かり置き場を置いたり、加工台を並列にするなど現実の加工機械に合わせて柔軟なモデル作成を簡単に行うことができます。
まとめ
今回の記事では、製造現場で広く使われている汎用ロボットを使用した自動プレス機を取り上げ、その動作をシミュレーションで再現しました。assimeeでは、生産ライン上のさまざまな加工機械をモデル化し、条件を変えながら機械の動作のシミュレーションをできます。これにより、工作機械のサイクルタイムや加工工程を検証し、生産管理の効率化につなげることが可能となります。
assimeeでは、実際の製造プロセスをモデル化し、シミュレーションすることで、プロセスの見える化や潜在的な課題の洗い出しを行うことができます。製造プロセスのデジタル化や課題解決でお悩みの方は、ぜひお問い合わせください。